 En
En
Оборудование для вертолетного спорта
В ходе летных испытаний оборудования, проводимых в контексте решения задачи об автоматизации посадки беспилотных летательных аппаратов вертолетного типа 27.12.2017 г. на аэродроме Конаково при поддержке Максима Сотникова и Олега Пуоджюкаса, принимающей стороной был задан вопрос, насколько испытываемая система определения положения вертолета в пространстве может быть применима для оценки мастерства пилотов при прохождении упражнений на соревнованиях. Для получения ответа программа испытаний была дополнена экспериментами, в ходе которых пилот Олег Пуоджюкас демонстрировал элементы упражнений в соответствии с Правилами и положениями чемпионатов мира и континентов по вертолетному спорту, а оборудование регистрировало телеметрию датчиков, сигнал GPS и видеосигнал. Основной целью настоящей статьи является освещение полученных результатов, основных проблем при разработке и достигнутых технических характеристик.
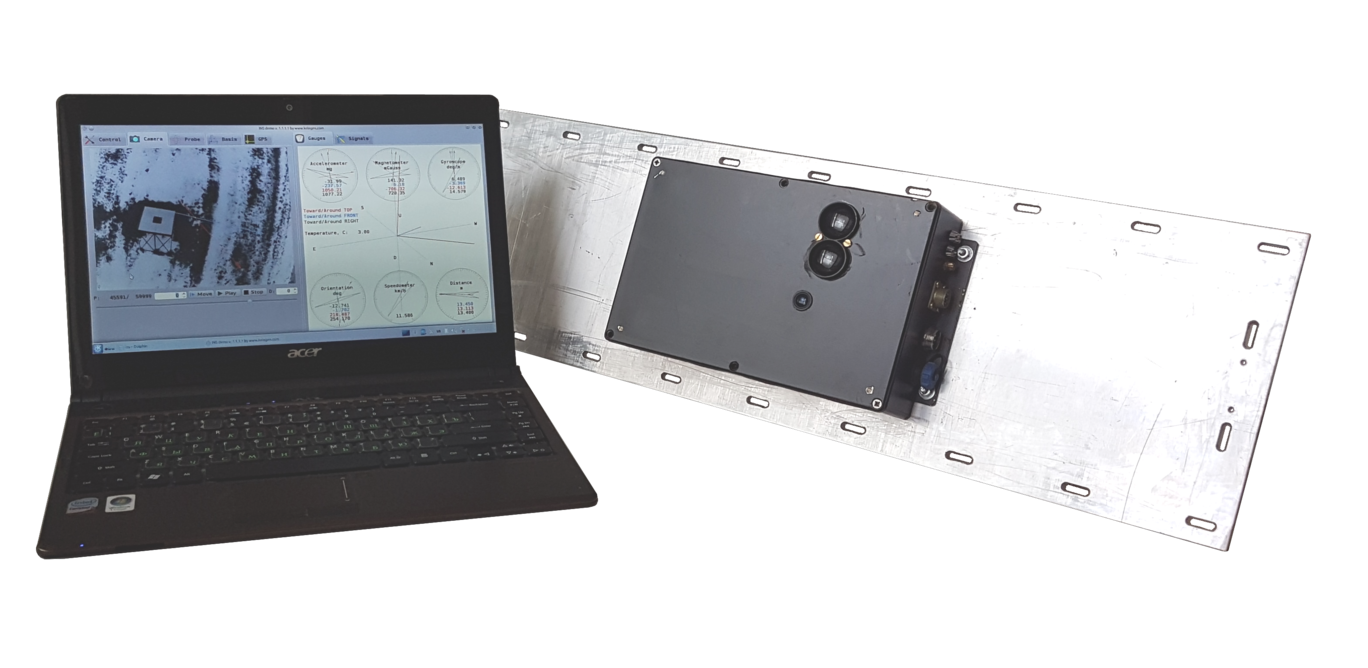
Рисунок 1 – Общий вид системы
Реализация системы
Механическая реализация системы
Для размещения оборудования на вертолете Robinson R44 был разработан специальный кронштейн, который крепился к штатному месту крепления сервисного люка без его демонтажа. Первая проблема, с которой пришлось столкнуться – невозможность использования штатных винтов люка с нестандартной резьбой M4 c шагом 0.8 мм: их длины оказалось недостаточно для крепления кронштейна. Плашку для нарезания резьбы с такими параметрами достать не удалось, но на помощь пришел токарный станок. Установив диаметр нарезаемой резьбы от M4, а шаг от M5, мы получили комплект шпилек.
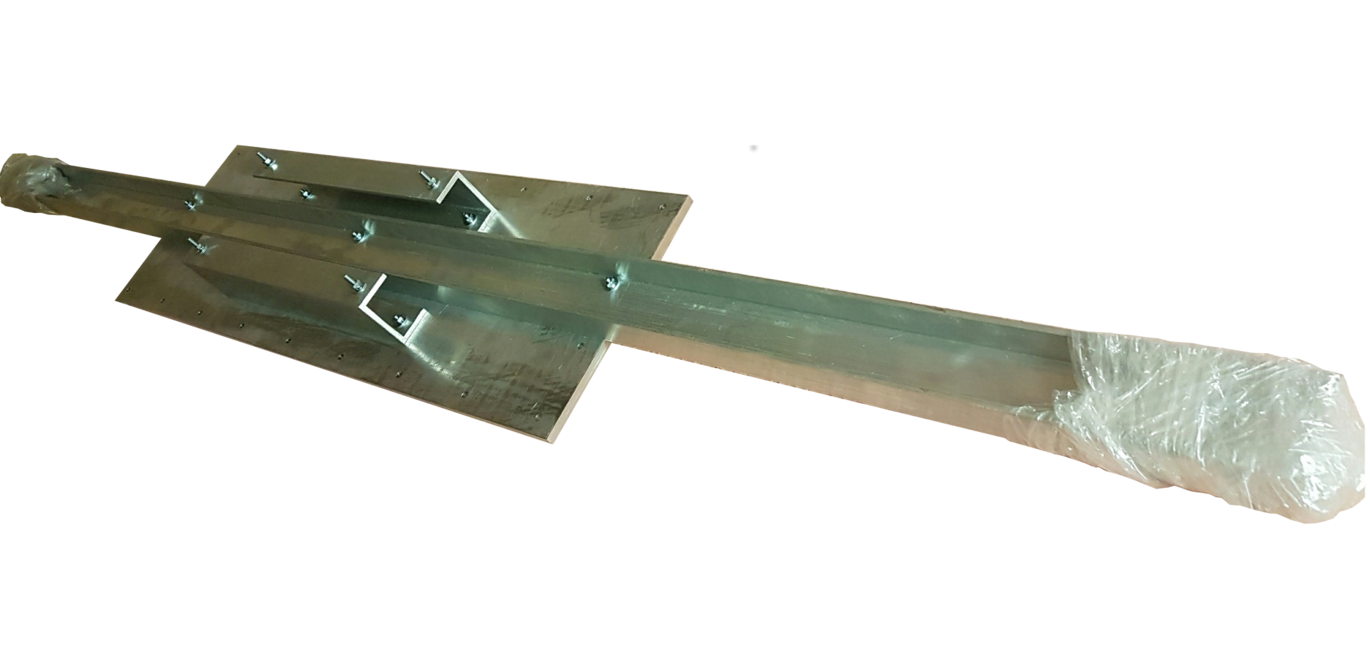
Рисунок 2 – Кронштейн для крепления системы и камер стереозрения на фюзеляже вертолета
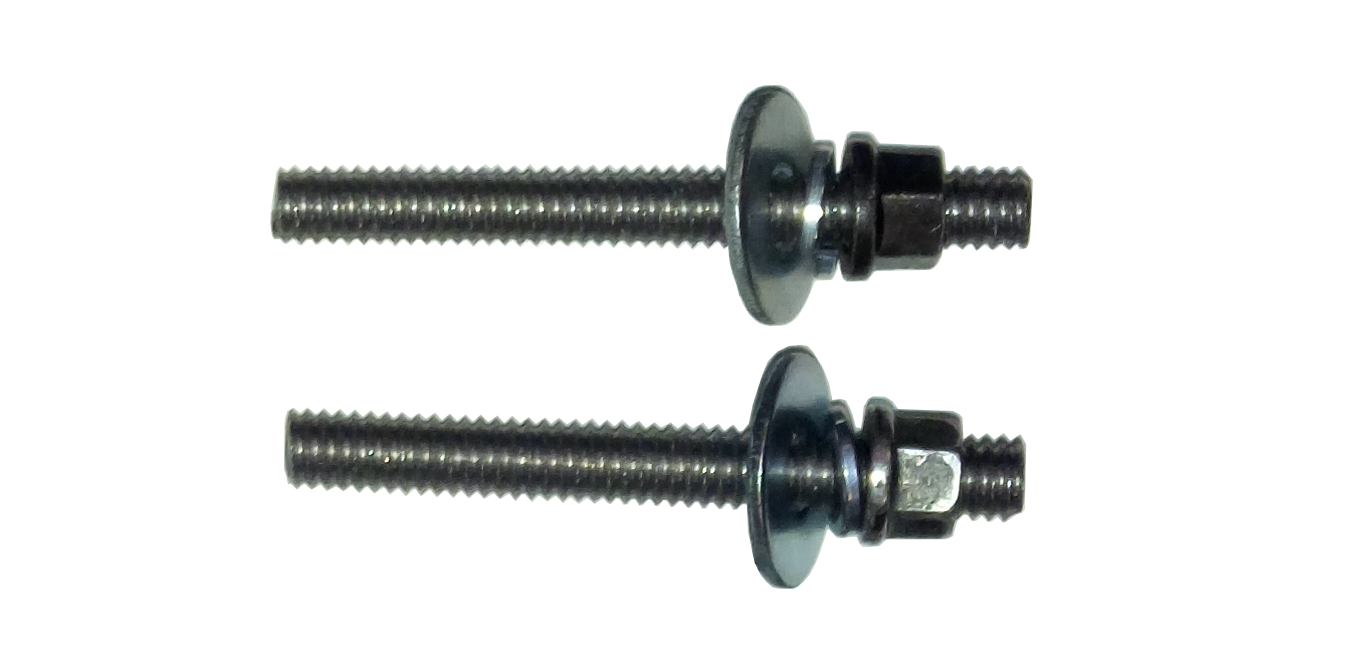
Рисунок 3 – Изготовленные шпильки с нестандартной резьбой M4 c шагом 0.8 мм
Отдельно необходимо отметить, что кронштейн, показанный на рисунке 2, разрабатывался для крепления не только блока системы, но и двух видеокамер, работающих в режиме стереозрения. Для задачи оценки качества выполнения упражнения подсистема стереозрения является избыточной, ее демонтаж позволяет уменьшить размер кронштейна.
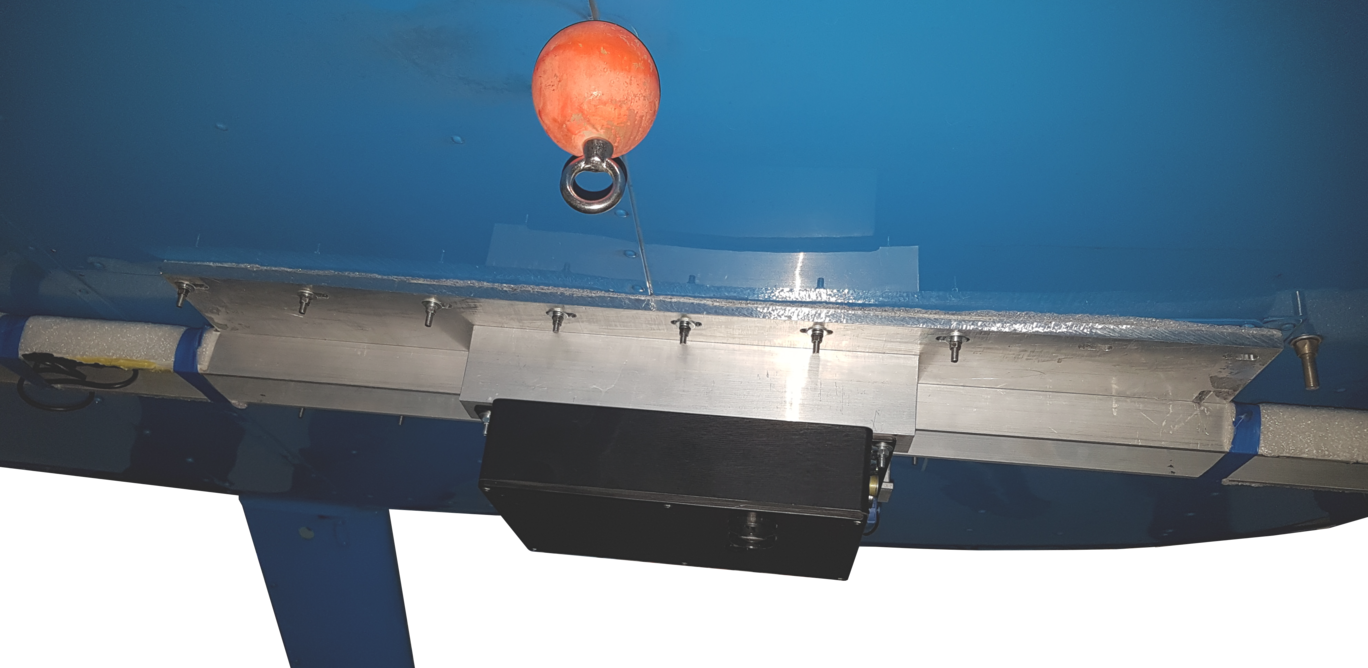
Рисунок 4 – Крепление кронштейна с оборудованием к фюзеляжу
Основой кронштейна является фланец – переходник между вертолетами различных типов и посадочными местами корпуса изделия. Такие фланцы должны быть разработаны для каждого типа летательных аппаратов, где планируется использование системы. Однако при креплении фланца к фюзеляжу возникла вторая неожиданная проблема: неопределенность координат винтов, которыми был закреплен сервисный люк. Сложилось впечатление, что при производстве вертолета отверстия сверлились по месту. Проблема была решена путем фрезерования овальных отверстий, допускающих подобные отклонения координат. С обратной стороны на фланец была наклеина пенополиуритановая прокладка для предохранения лакокрасочного покрытия фюзеляжа.
Аппаратная реализация системы
Структурная схема системы приведена на рисунке 5. Полный вариант реализации системы включает 5 уровней прохождения сигнала от места его регистрации до отображения пользователю.

Рисунок 5 – Структурная схема системы
Элементы уровней 3 – 5 образуют бортовую часть системы и смонтированы в едином корпусе. Уровень 2, представляющий собой беспроводную сеть Wi-Fi, строится на стандартном оборудовании. Уровень 1 может быть представлен персональными компьютами, планшетами, смартфонами.
Сигналы, регистрируемые инерциальной навигационной системой (ИНС), представлены в таблице.
| Сигнал с датчика | Диапазон | Частота дискретизации |
|---|---|---|
| ускорений | ± 2g | 1600 Гц |
| магнитного поля | ± 2 Гаусс | 100 Гц |
| угловой скорости (гироскопа) | ± 245 °/с | 800 Гц |
| температуры | от -40 до +85 °С | 100 Гц |
| дальномера | от 0 до 60 м | 20 Гц |
Микроконтроллер ИНС осуществляет первичную фильтрацию данных одновременно с приведением выдаваемых сигналов к единой частоте 100 Гц (период 0.01 с). Эта частота является задающей и определяет временную сетку для всей системы.
Видеокамера регистрирует изображение с разрешением 320х240 точек с частотой 25 кадров/с. Таким образом на 4 отсчета ИНС приходится одно изображение с камеры. Особенностью применяемой камеры является отсутствие фильтра, отрезающего ИК область спектра, что делает возможным подсвечивание знаков на земле. Данное свойство в перспективе позволит упростить алгоритмы и повысить точность распознавания границ.
Глобальная навигационная система – стандартный GPS-приемник с выносной антеной. Выдача сигнала осуществляется на частоте 2 Гц. Таким образом на 50 отсчетов ИНС приходится 1 отсчет GPS. Работа GPS-приемника связана с высокой постоянной времени фильтрации. Вызванное этим запаздывание будет продемонстрировано в одном из экспериментов далее в настоящей статье.
В качестве накопителя данных в эксперименте применялась обычная USB-флешка, что приводило к кратковременным задержкам, вызванным тем, что файловая система не успевала отрабатывать операцию записи, несмотря на примененеие функции mmap(). В дальнейшем данную проблему планируется устранить путем использования жесткого диска с большим буфером.
Бортовой вычислитель был представлен микрокомпьютером с 2х ядерным процессором Cortex-A9 и 1 GB оперативной памяти, работающим под управлением операционной системы Linux. То, что Linux не является ОС реального времени, не ограничивает работоспособность системы, поскольку за стабильность временной сетки отвечает микроконтроллер ИНС. На данном компьютере реализован UDP сервер, который транслирует бортовую телеметрию в широковещательном режиме, что делает возможным ее просмотр одновременно на нескольких устройствах без дополнительной нагрузки на сеть.
Источник питания. В эксперименте был использован преобразователь питания из напряжения бортовой сети постоянного/переменного тока или аккумулятоара в постоянное напряжение +5V DC и +12V DC. Сочетание двух этих напряжений делает возможным применение большинства стандартной компьютерной периферии.
Программная реализация системы
Не вдаваясь в технические особенности реализации программного обеспечения и распределения его функций по элементам аппаратной реализации, сосредоточимся на преобразованиях регистрируемых величин и отображении их на графическом пользовательском интерфейсе.
Введем глобальную систему координат (ГСК), оси которой обозначены серыми линиями и направлены следующим образом:
- вертикальная ось DU направлена вдоль вектора ускорения свободного падения (вертикально);
- одна из горизонтальных осей SN направлена с юга на север;
- вторая горизонтальная ось WE направлена перпендикулярно первым двум с запада на восток.
Введем локальную систему координат (ЛСК), оси которой обозначены разноцветными линиями и связаны с фюзеляжем вертолета следующим образом:
- красная ось направлена от пола к потолку;
- синяя ось направлена от хвоста к носу;
- зеленая ось направлена от левой до правой стороны кабины.
Начало отсчета ЛСК связано с центром матрицы камеры. Красная ось совпадает с оптической осью камеры, синяя ось – с осью y, а зеленая – с осью x матрицы. Начало отсчета дальномера также связано с точкой его установки. Данное совмещение выбрано с целью упрощения интерпретации результатов эксперимента, но может быть перенесено в точку подвески груза в соответсвии с Правилами и положениями чемпионатов мира и континентов по вертолетному спорту.
Интерфейс программного обеспечения представлен на рисунке 6.
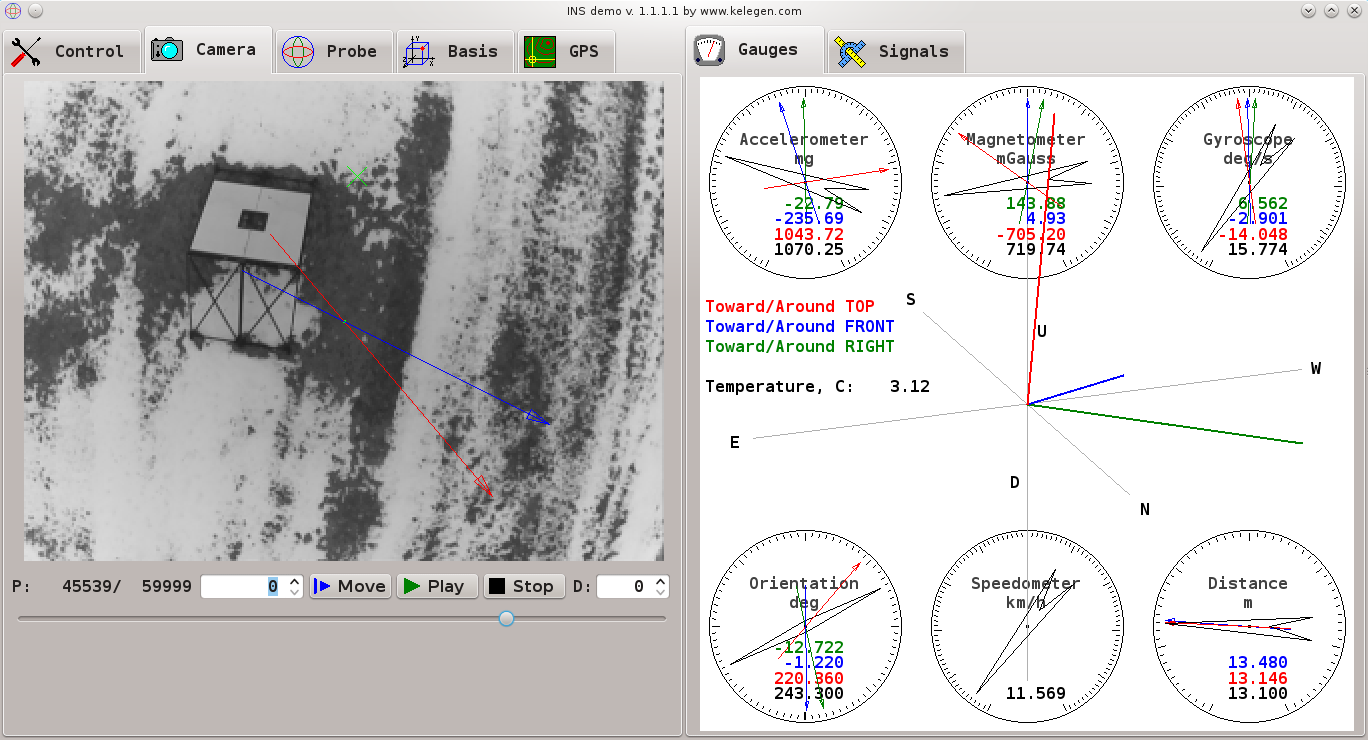
Рисунок 6 – Графический пользовательский интерфейс
Программное обеспечение вычисляет матрицу перехода между ЛСК и ГСК и отображает ориентацию базиса ЛСК в ГСК для каждого отсчета ИНС с частотой 100Гц. При этом положение красной оси зависит только от показаний акселерометра, а положения синей и зеленой осей зависят от магнитометра и акселерометра. Это важно, поскольку пересчет высоты из показаний дальномера осуществляется путем домножения на направляющий косинус красной оси к оси DU и, следовательно, не зависит от показаний датчика магнитного поля (не зависит от точности показаний компаса).
Рассмотрим назначение основных циферблатов и шкал.
Циферблат акселерометра содержит:
- три тонкие стрелки (красная, синяя, зеленая), нулем для которых является середина шкалы
- одну толстую черную стрелку, показывающую геометрическую сумму векторов, нулем для которой является левое начало шкалы
цена деления для всех стрелочных указателей одинаковая
Циферблат магнитометра содержит:
- три тонкие стрелки (красная, синяя, зеленая), нулем для которых является середина шкалы
- одну толстую черную стрелку, показывающую геометрическую сумму векторов, нулем для которой является левое начало шкалы
цена деления для всех стрелочных указателей одинаковая.
Циферблат гироскопа содержит:
- три тонкие стрелки (красная, синяя, зеленая), нулем для которых является середина шкалы
- одну толстую черную стрелку, показывающую геометрическую сумму векторов, нулем для которой является левое начало шкалы
цена деления для всех стрелочных указателей одинаковая.
Еще раз отметим, что применяемый гироскоп измеряет угловую скорость, а не угол.
Циферблат ориентации:
- зеленая стрелка (разворот вокруг поперечной оси) – тангаж
- синяя стрелка (разворот вокруг продольной оси) – крен
- красная стрелка (разворот вокруг вертикальной оси) – рысканье (азимут)
- черная толстая стрелка (азимут по данным GPS)
Поскольку GPS вычисляет азимут по вектору скорости, при движении задним ходом красная тонкая и черная толстая стрелки могут быть противоположно направлены, а при низких скоростях может происходить потеря ориентации.
Циферблат скорости:
- единственная стрелка показание скорости по данным GPS
Циферблат расстояний:
- синяя стрелка – показание дальномера
- красная стрелка – вычисленная высота (показания дальномера, умноженные на косинус угла между красной осью и осью DU)
- черная стрелка – высота по данным GPS
Поле отображение видео:
- красная стрелка – азимут по данным ИНС
- синяя стрелка – азимут по данным GPS
- зеленый маркер – проекция точки установки системы на плоскость видео (проекция высоты на землю)
- параметр P – номер отображаемой точки по шкале ИНС. Если разделить номер точки на 100, то получим время в секундах от начала эксперимента
Демонстрация работы
В ходе испытаний было проведено 5 экспериментов, в контексте данной статьи нас интресуют эксперименты 004 и 005. При этом GPS был включен только в ходе 5 эксперимента, соответственно в ходе отображения телеметрии эксперимента 004, данные, зависящие от GPS будут отображаться некорректно.
Также следует обратить внимание на то, что вертолет содержит много ферромагнитных компонент, которые влияли на работу компаса, при этом поправка не учитывается.
Полет на точность
Демонстрирует следование вертолета над наземным знаком, при этом этом зеленый маркер отображает проекцию точки установки системы на плоскость видеоизображения. И делает возможным фиксацию выхода и входа вертолета в габарит знака. Из телеметрии, особый интрес представляют показания высотомера и пересечение границ коридора.
При выполнении упражнения на точность производится запись с видеокамеры и датчиков системы. Нарушение высоты фиксируется в автоматическом режиме (см. рис. 1.1), нарушение коридора определяется оператором путем подачи сигнала в момент пересечения границы коридора.
Видео 1.1

Рисунок 1.1

Рисунок 1.2
Разворот на горке (перегрузка)
Для определения адекватности выбора динамического диапазона акселерометра дважды был выполнен маневр "разворот на горке", в ходе которого была выявлена максимальная перегрузка в 1.6 g. Два последовательных пика на графике (рисунок 2.1) соответствуют двум разворотам.
Видео 2.1

Рисунок 2.1
Взлет – посадка
Для определения моментов посадки и взлета оптимально подходят показания высотомера (рисунок 3.1). Однако следует обратить внимание на углы крена и тангажа (синий и зеленый параметры циферблата ориентации).
Видео 3.1

Рисунок 3.1
Возможности высотомера
Полет над хвостом и лопастями вертолета МИ-2
Видео 4.1

Рисунок 4.1.1

Рисунок 4.1.2
Полет над хвостом вертолета Bell 407
Видео 4.2

Рисунок 4.2.1
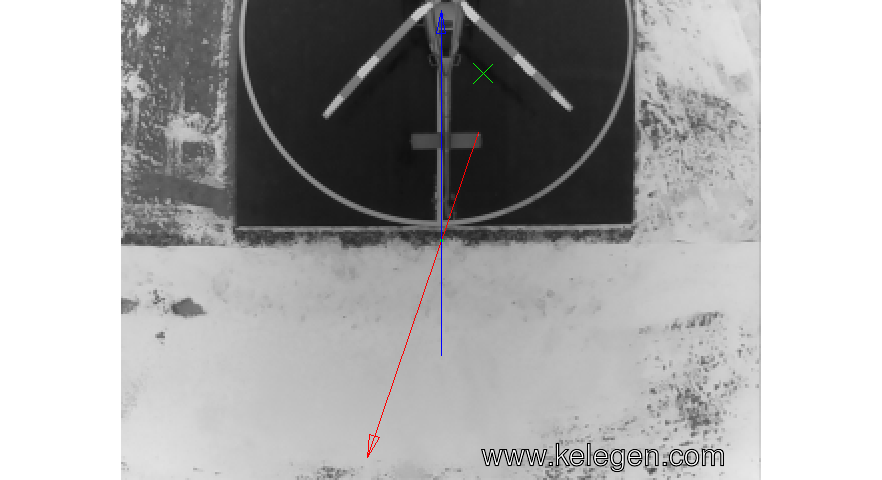
Рисунок 4.2.2
Полет над блоком
Видео 4.3

Рисунок 4.3.1
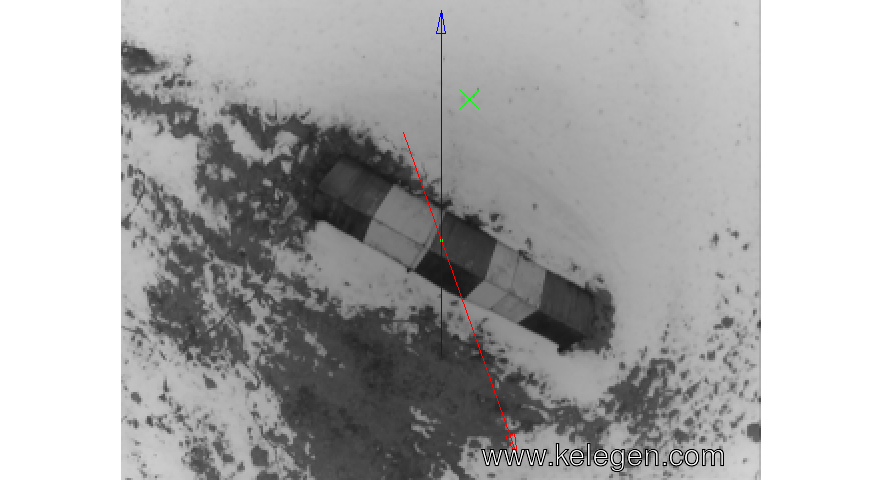
Рисунок 4.3.2
Полет над деревьями
Видео 4.4

Рисунок 4.4.1
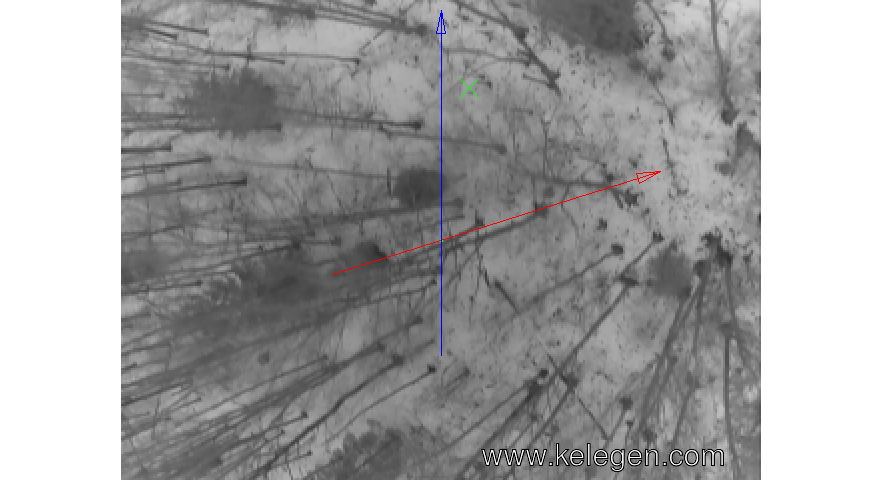
Рисунок 4.4.2
Сравнение показаний высотомера и GPS
Демонстрация быстродействия ИНС и GPS показана на примере определения высоты. На графике наглядно видно запаздывание сигнала GPS относительно ИНС примерно на 10 секунд. Шум сигнала высотомера в начале соответствует полету над деревьями, который отдельно приведен на видео 4.4.
Видео 5.1

Рисунок 5.1
Заключение
На текущий момент создан работоспособный прототип системы, позволяющий объективно оценивать поведение машины в воздухе и над поверхностью земли.
В статью попали наиболее наглядные результаты экспериментов. Результаты, демонстрирующие узкоспециализированные аспекты работы системы могут быть предоставлены по запросу.
Выражаем благодарность за помощь в организации и проведении экспериментов Максиму Сотникову и Олегу Пуоджюкасу!
Рисунок 1
Общий вид системы
Рисунок 2
Кронштейн для крепления системы и камер стереозрения на фюзеляже вертолета
Рисунок 3
Изготовленные шпильки с нестандартной резьбой M4 c шагом 0.8 мм
Рисунок 4
Крепление кронштейна с оборудованием к фюзеляжу
Рисунок 5
Структурная схема системы
Рисунок 6
Графический пользовательский интерфейс
Рисунок 1.1
Показания высотомера при выполнении полета на точность от взлета до посадки
Рисунок 1.2
Выход проекции базовой точки на поверхность земли (зеленое перекрестье) за пределы коридора
Рисунок 2.1
Показания акселерометра при выполнении маневров "разворот на горке".
Рисунок 3.1
Показания высотомера при посадке и взлете.
Рисунок 4.1.1
Полет над хвостом и лопастями вертолета МИ-2.
Рисунок 4.1.2
Скриншот над вертолетом МИ-2.
Рисунок 4.2.1
Полет над хвостом вертолета Bell 407.
Рисунок 4.2.2
Скриншот над вертолетом Bell 407.
Рисунок 4.3.1
Полет над блоком.
Рисунок 4.3.2
Скриншот над блоком.
Рисунок 4.4.1
Полет над деревьями.
Рисунок 4.4.2
Скриншот над деревьями.
Рисунок 5.1
Запаздывание сигнала высоты по GPS относительно сигнала высотомера.